Autonomous System Control
Behaviour Planner (Intersection scenario), Reactive path planner (Polynomial Spirals planner, Lattice Planner, Optimization), Velocity profile Generator (Trapezoidal Profile + Linear ramp profil)
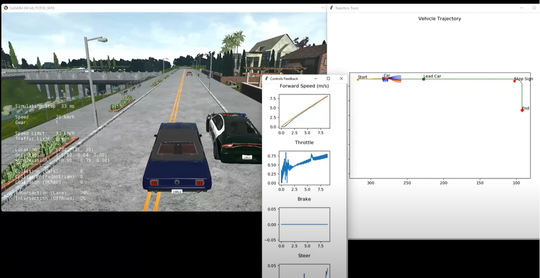
In modern transportation system, lane-following motion control is the first-step of self-driving car on road.
A Deep Q network-based lane change supervisor and local lane change controller design
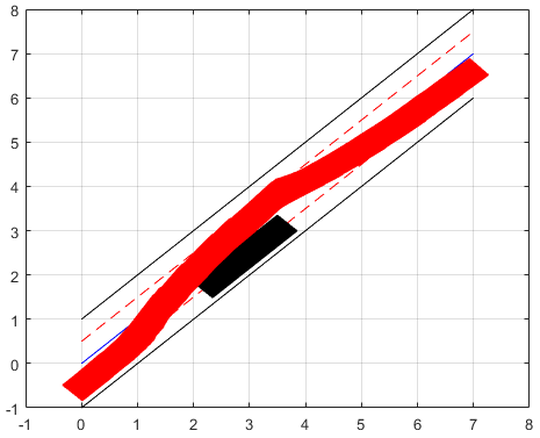
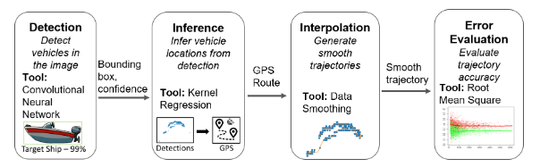
Multi-Model learning for smooth Georeferenced Tracking from an Uncalibrated Monocular Camera.
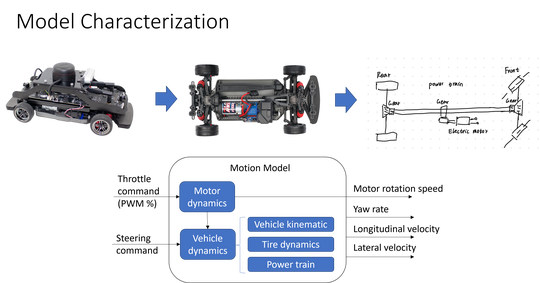
Model characterization of vehicle must contain errors in dynamical parameters. The parameter error cause inaccurate state estimation from sensors. I am presenting an idea of using Extended Kalman filter to estimate states and parameter simultaneously to produce more accurate state estimation under parameter error.
A Moving-horizon Quadratic Filter design produces smoother estimation of derivatives of signals than Kalman Filter
Robust concensus control for multi-agents system in presence of external disturbance and model parameter uncertainty.
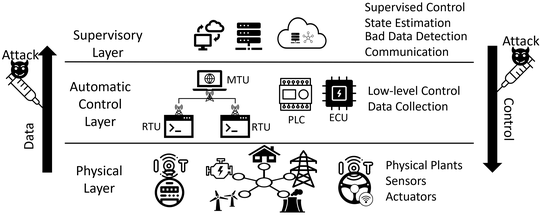
Cyber-Physical System Security
Developing concurrent physics-driven and data-driven learning approaches to advance the resiliency of cyber-physical systems in ways that are unattainable using either approach alone

How does the attack history affect the feasibility of the attack generation problem at the current time? In other words, is Recursive Feasibility essential for attack generation problem?
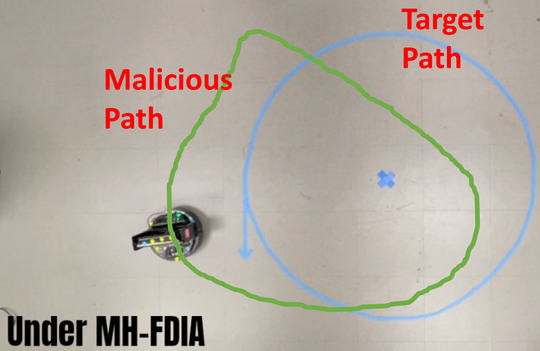
An unified attack generation appoach. It targets any systems, from linear to nonlinear, from power system to autnomous vehicles. It only requires system runtime data.
Leaning based active attack detection and localization. A GPR-based approach and a MLP-based approach.
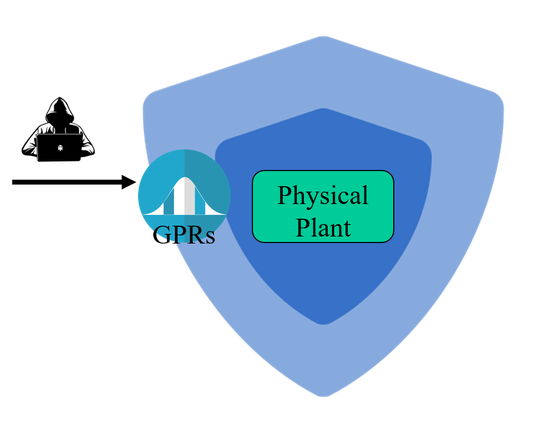
Enhanced resiliency in cyber-physical systems could be achieved by a statistics-based pruning algorithm coupled with weighted L1 estimator design.

Save all images